
The main objective of the task “Control and navigation” is to develop hardware and most of all software modules facilitating execution of elementary navigation, localization and motion control tasks for differentially driven wheeled mobile (with particular emphasis on skid-steering robots) in a practical environment. Following mobile robot motion tasks were designed and implemented:
- set-point control and waypoint-following tasks with arbitrary intermediate longitudinal velocities by utilization of: VFO (Vector Field Orientation) control strategy, transverse function based feedback control, and a tracking control law derived from Lie group theory
- local motion planning algorithms:
- the virtual robots approach,
- potential functions,
- collision avoidance for selected obstacle models,
- docking, i.e. precise active robot stabilization for a given set-point,
- elementary motion primitives for teleoperation.
At the same time, the effects of skid and slip phenomena on robot motion were measured and analyzed. The analysis resulted in a simple model of slip phenomena utilized in feedback motion control.
A simplified kinematic model for a particular class of mobile robots with multiple driven wheels was derived under the assumption of velocity-based control. This class of mobile robot is especially important in outdoor applications. Due to platform geometry, such vehicles are moving with significant slip between wheels and ground. As a result they are strictly dynamic objects, the description of which requires modeling of environment interaction forces. Unfortunately, such modeling is very demanding, often inaccurate and notoriously difficult to apply successfully in motion planning and feedback control algorithms. Thus, kinematic models locally approximating robot motion for assumed velocity and acceleration bounds are utilized. Their quality is sufficient for considered motion tasks.
For the purposes of realization of the waypoint-following task in cluttered environnments, a local motion planning and control algorithm based on the VFO control strategy was developed. VFO controller for the waypoint-following task was extended with a reactive collision avoidance strategy, the main idea of which is modification of the convergence vector field according to the combination of values of potential-like functions defined for every detected circular obstacle. The resulting motion controller was complemented by a motion strategy optimizer, which performs online exploration of a discrete space of possible obstacle avoidance decisions, which correspond to robot path homotopy classes.
An alternative strategy of realization the above motion tasks was developed using transverse functions. To achieve required motion quality, the feedback motion control algorithm was complemented by a trajectory generator utilizing 5-th order polynomial splines computed to satisfy given phase constraints. Additionally, the motion control algorithm was extended to facilitate asymptotic stabilization for set-point control tasks and trajectory tracking restricted to a particular class of reference trajectories. The main idea of this extension is introduction of an adaptive online tuning strategy for extended transverse functions, which ensures that the transverse function will vanish over time and satisfy transversality conditions at the same time. Such an approach enables driving the robot along “infeasible” directions, i.e. the ones unattainable due to nonholonomic constraints. This unique property differentiates this control strategy from e.g. VFO, which on the other hand is more suited for “feasible” movements due to its low computational costs, predictable non-oscillatory transient states and natural motion character in nominal conditions, which can be shaped by planning algorithms thanks to the directing effect.
While both of the above strategies seem indispensable for flexible velocity-level robot motion control, an additional tracking control strategy was implemented. It is a smooth state feedback characterized by low sensitivity to measurement noise even for slowly-varying trajectories. This property was verified by extensive experimental results. To summarize, a wide breadth of complementary motion control strategies specialized for specific practical motion scenarios was implemented and experimentally verified.
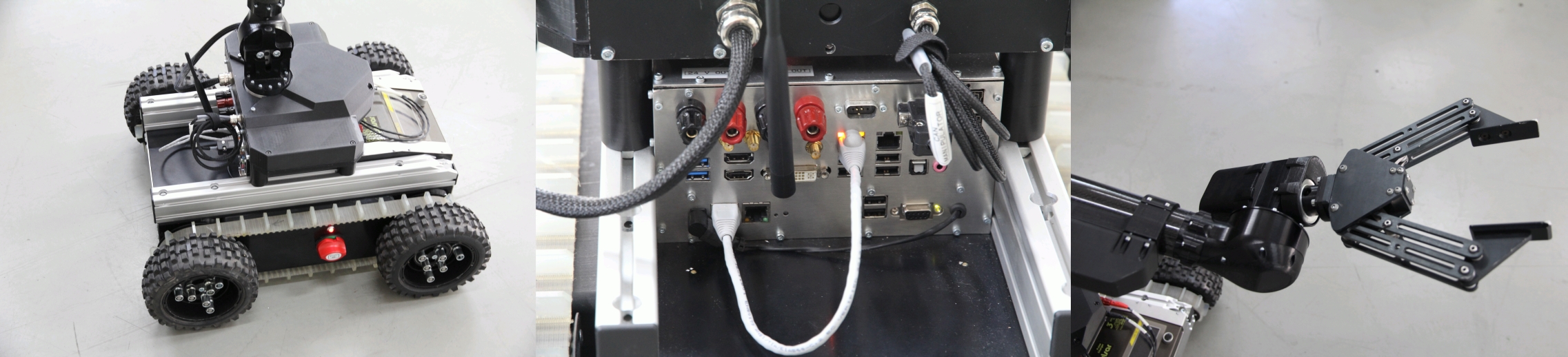
Experimental mobile robot platform developed in Chair of Control and Systems Engineering at Poznań University of Technology
Practical implementation and experimental validation of motion control algorithms complemented by local navigation algorithms during the course of RobREx project requires utilization of a mobile robot with specific driving properties, modular hardware, and modular software architecture enabling rapid prototyping. To meet those criteria, the team from Chair of Control and Systems Engineering has designed and built the experimental mobile platform RoKSIS.
The robot is a compact vehicle with dimensions of 60 x 55 x 30 cm, which weighs around 30 kg. It is powered from a cable or an on-board LiPo battery pack, which guarantees at least 2 hours of continuous usage. The dimensions of the robot were chosen to facilitate comfortable mounting of various sensors and enable the robot to navigate easily through narrow corridors of urban buildings. Similarly to search and rescue robots utilized by Industrial Research Institute for Automation and Measurements (IRIAM), the robot is a skid-steering vehicle equipped with two pairs of wheels mechanically locked in synchronization. Since there are no swivel wheels available, the platform turns by skidding resulting from the difference between wheel velocities on each of its sides. Such design approach leads to a simple and robust mechanical construction of the vehicle at the expense of additional difficulties in motion control algorithms design due to the omnipresence of skid and slip phenomena. Thanks to the application of high-power electrical motors with sinusoidal commutation and precise power-train, the presented platform enables accurate control of wheel velocities in the presence of longitudinal velocities exceeding 2 m/s. Such driving properties make it possible to create conditions in which skid and slip phenomena are strongly visible and their influence on robot motion can be measured. Due to the lack of accurate analytic models of friction, such an experimental setup is crucial during development of models and compensation algorithms for skid and slip phenomena.
Apart from specific robot driving properties, motion control and local navigation tasks require a local perception system with additional on-board sensors and software components utilized to estimate robot state, acquire information about local topology of motion environment and detect unforeseen obstacles along robot path. Local environment representation and obstacle models are generated online during motion task execution by processing the data from two laser scanners (LIDAR) with a range of up to 5 m and visibility angle of 240 degrees. Placement of the scanners on the platform has been chosen to maximize the effectiveness of obstacle detection during both forward and backward motion. Raw data is captured with frequency of 10 Hz, filtered and then segmented using statistical methods to obtain a set of geometric primitives such as line segments or circles, which are directly used by local real-time motion planning and feedback control algorithms. Effective obstacle avoidance during feedback control is also reliant on estimated robot state, which is computed by a system of sensory fusion combining the data from:
- software motion predictor based on simplified robot kinematics,
- local estimation of robot position based on the image from on-board digital camera,
- estimation of robot displacement resulting from the analysis of difference between laser scans acquired at consecutive time instants (i.e. scan matching).
The difference between the predicted and actual robot velocity is measured with an additional inertial measurement unit mounted in the vicinity of platform mass center. Signals generated by this sensor are utilized in a feedback control loop, which partially compensates the effects of slip phenomena.
Motion control and local navigation algorithms are developed from the ground up as software modules organized in a specifically designed agent-like structure, which is tightly integrated with Robot Operating System (ROS). Such integration resulted in a portable rapid prototyping environment specialized for motion control algorithms, which operates on the on-board PC to facilitate efficient communication with sensors and motor control units, while preserving a high degree of robot autonomy at the same time. The strict separation of software components into hardware managing components, common system management components and substitutable components handling particular common sub-tasks of motion control algorithms enables rapid prototyping of complex control systems, which can be compared during experimental execution of practical robot motion scenarios. Thanks to its automatic module composition mechanisms, robot software system can to some degree adapt to changing motion conditions. For example, a sudden loss of data from IMU sensor will result in automatic switch to a static slip compensation policy, although such a switching behavior did not had to be explicitly programmed by developers.
The effectiveness of assumed hardware and software solutions comprising the experimental platform RoKSIS was validated during experiments with a search and rescue robot supplied by IRIAM. The developed software system facilitated effective deployment of developed solutions to IRIAM robot. Motion quality attained on IRIAM robot is close to the one observed on RoKSIS platform thanks to their similar mechanical design.